I. La partie mécannique
La première question à se poser pour construire
un robot pour ce genre de match est de se demander comment poser
les balles dans les paniers. Deux solutions sont à notre
disposition : la solution balistique (envoyer les balles à
distance, comme une catapulte) ou les stocker et les déposer
au contact du panier.
Nous avons retenu la deuxième solution, la solution balistique
nous paraissant trop aléatoire de part la taille des balles
(14 cm de diamètre) et surtout par leur capacité
importante de rebond. En effet, lors de la comptabilisation des
points, seules comptent les balles présentes à l'intérieur
des paniers à la fin du match. (Voir Annexe)
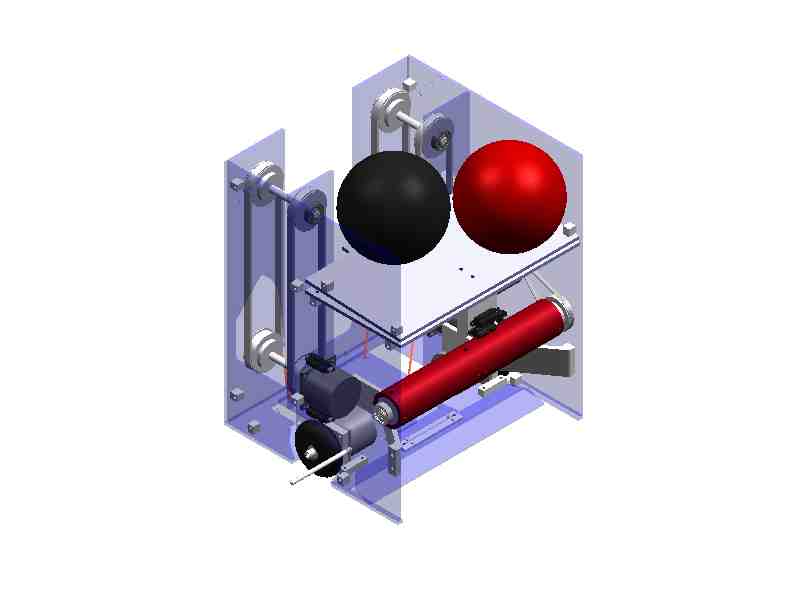
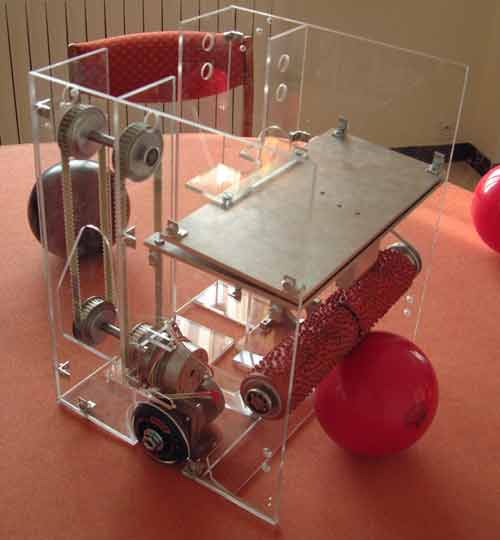
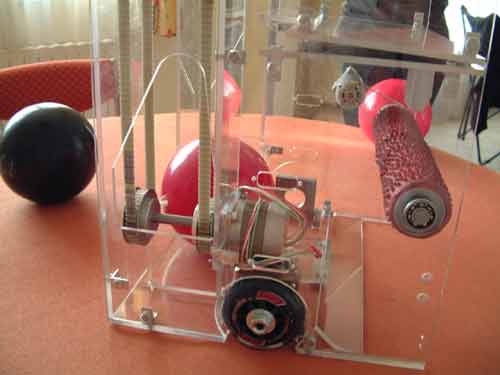
Notre robot est constitué de deux parties : une basse
permettant d'attraper les balles et de les acheminer à
l'étage supérieur, et une partie haute composée
de deux réceptacles qui déposera les balles dans
les paniers (voir Plans en Annexe).
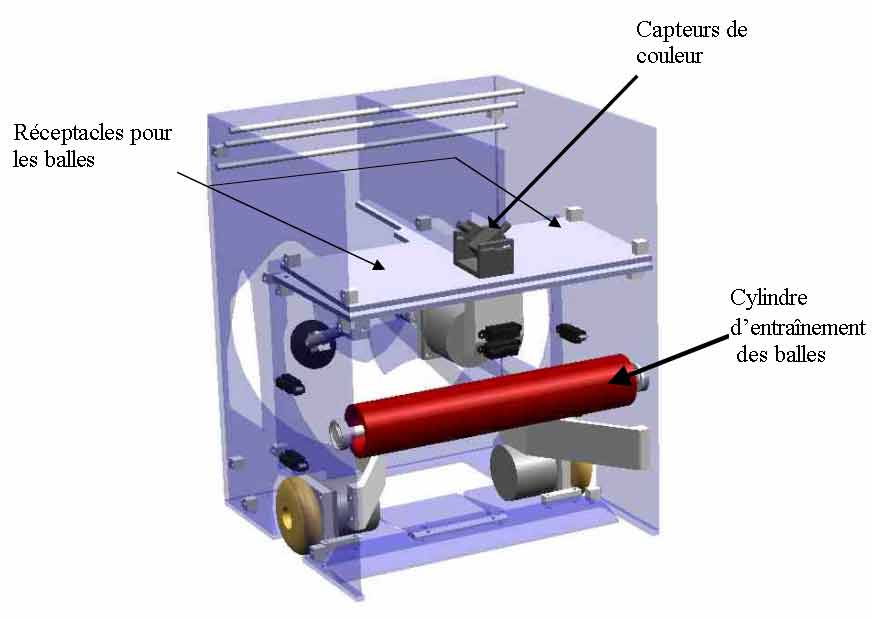
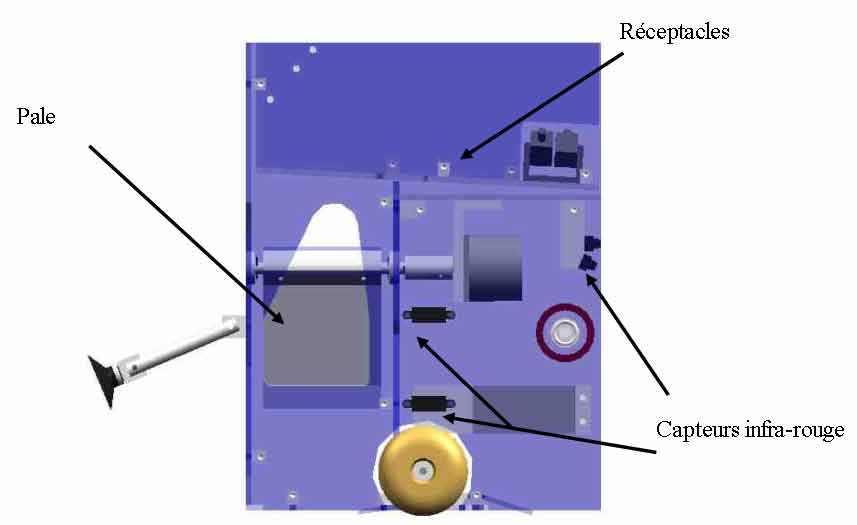
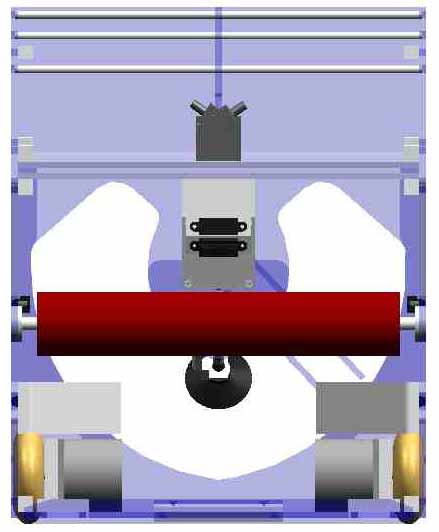
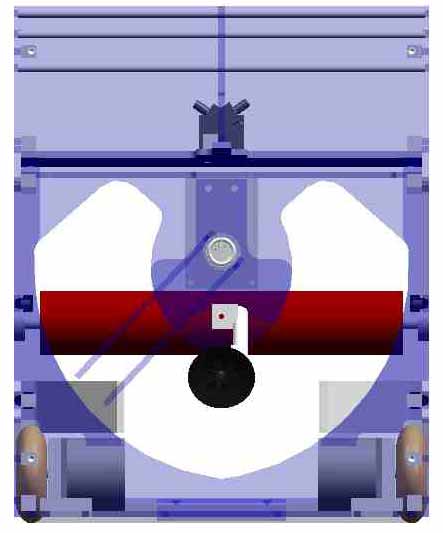
Dans la partie basse (la base du robot), l'avant du robot est
muni d'un cylindre qui tourne en permanence entraînant ainsi
les balles vers l'intérieur et le fond du robot. Là,
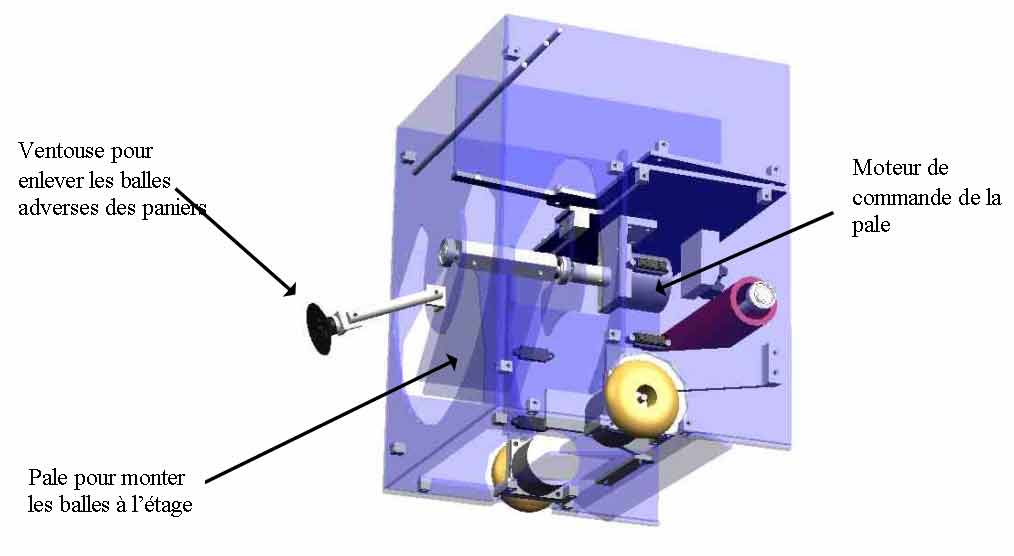
les balles sont montées grâce à une pale qui
peut desservir le réceptacle droit ou gauche de la partie
haute.
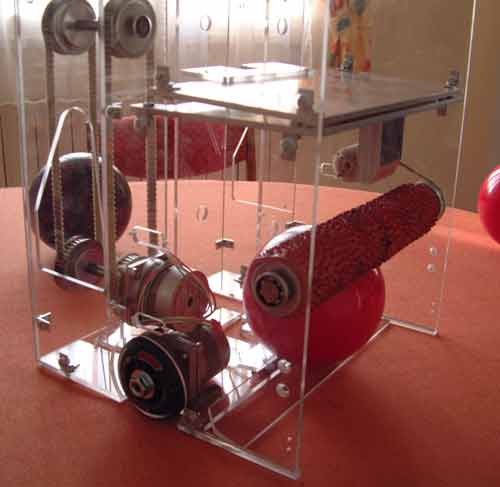
A l'étage, les deux réceptacles indépendants
contenant chacun une balle et placés à hauteur des
paniers, comportent un capteur de couleur permettant de distinguer
les balles rouges des noires avant de les déverser dans
les paniers.
Notre robot peut ainsi contenir jusqu'à 5 balles : 2 dans
les réceptacles prêtes à être déversée,
1 sur la pale bloquée à mi-hauteur, et 2 dans la
partie basse du robot attendant d'être montées.
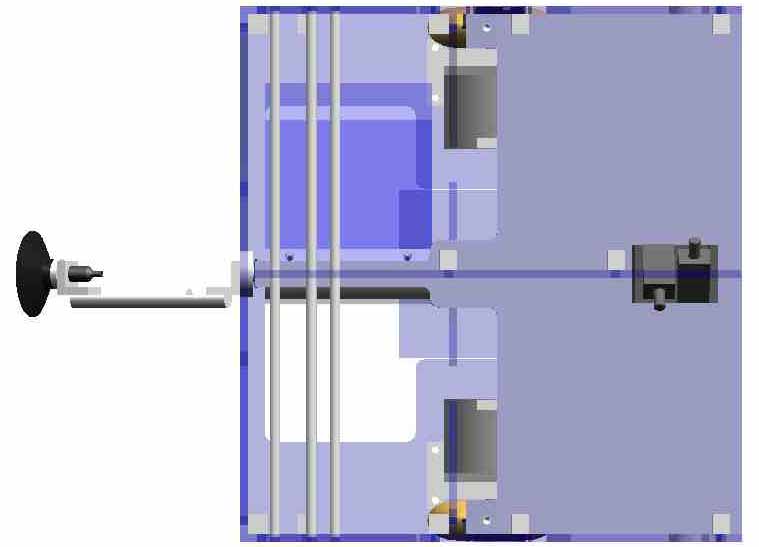
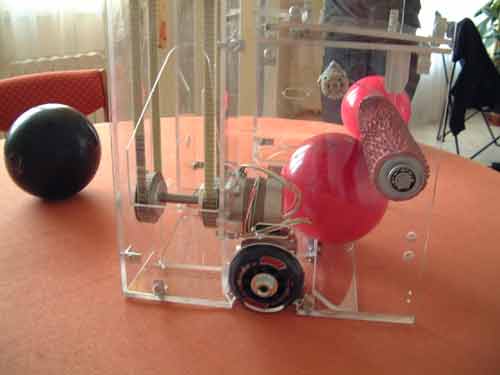
De plus, le robot comporte une " botte secrète "
sous la forme d'une ventouse commandable placée à
l'arrière. En effet les paniers ayant leur base ouverte,
les balles sont accessibles au bas du panier (voir schéma
du terrain). Notre robot peut donc enlever les balles posées
par l'adversaire pour placer les nôtres. On enlève
donc des points à l'équipe adverse, en marquant
nous même par la même occasion.
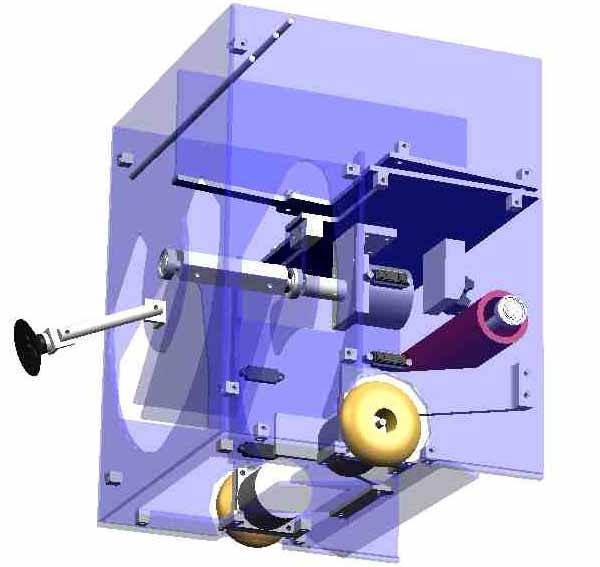
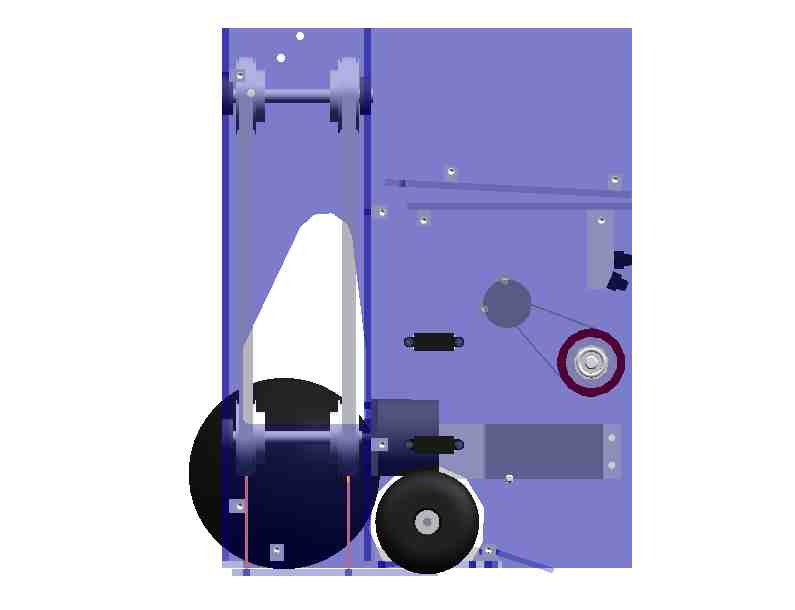
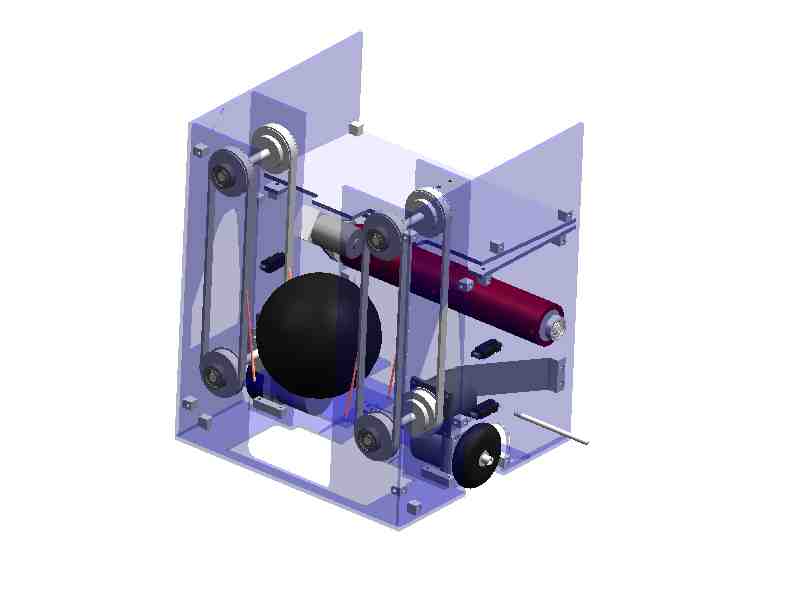
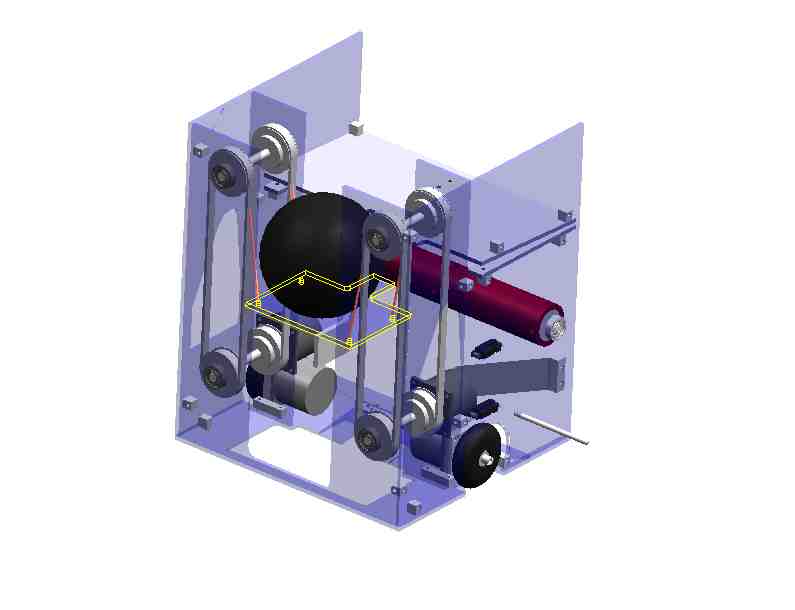
Voici la nouvelle version.
II. La partie électronique
La construction d'un robot autonome demande de pouvoir se localiser
à tout moment sur le terrain, ainsi que de repérer
et d'identifier les balles. Pour se faire, le robot est équipé
de :
" 1 système de suivi de lignes blanches au sol
" 1 système de guidage par balises radio et triangulation
" 4 capteurs infrarouge (un par côté) donnant
la distance d'une balle jusqu'à 30cm et de tout autre obstacle
jusqu'à 80cm
" 1 ensemble de capteurs de contact pour relayer l'infrarouge
à faible distance
" 2 capteurs de couleur pour différentier les balles
avant de les déverser
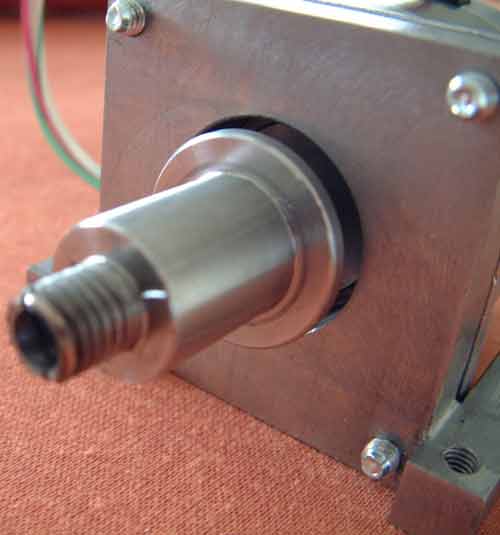
" 2 moteurs pas à pas indépendants pour la
propulsion
L'Architecture Logicielle et Matérielle
Notre ambition de mener notre équipe sur plusieurs années
nous oblige à construire une architecture logicielle modulable
et facilement réutilisable. Les différents systèmes
électroniques décrits ci-dessus sont donc reliés
au processeur central selon un réseau Maître - Esclave.
On peut donc rajouter de nouveaux modules facilement, et qui s'identifieront
auprès du processeur central lors de l'initialisation.
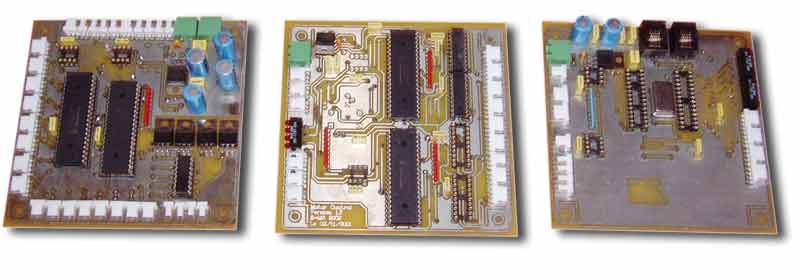
L'architecture se présente donc sous la
forme suivante :
Carte capteurs : toutes les informations fournies par les capteurs
(infrarouge, de couleur, de contact) sont centralisées
sur cette carte.
Carte Moteurs : centralise les
commandes destinées aux moteurs (les deux moteurs de propulsion,
ou le moteur de la pale qui monte les balles), et renvoie les
informations d'état de
ces moteurs.
Carte Localisation : gère
toute la partie localisation du robot par triangulation à
l'aide de balises infrarouge, et indique aussi la position relative
du robot adverse.
Le processeur central (le Maître): contient toute l'intelligence
du robot et interroge les différentes cartes (cartes capteurs,
localisation, et moteurs) pour prendre ses décisions, et
leur donne des ordres (carte moteurs) en conséquence.
III. La stratégie
 Nous
allons exposer un exemple de stratégie et de match dont
sera capable notre robot, sachant que celle-ci n'est pas figée
et est susceptible d'évoluer selon le développement
et l'amélioration des capteurs électroniques. De
plus, le comportement du robot sera dicté essentiellement
par les analyses faites en cours de match, et la stratégie
évoluera donc au fur et à mesure des décisions
qu'il aura prise. Nous
allons exposer un exemple de stratégie et de match dont
sera capable notre robot, sachant que celle-ci n'est pas figée
et est susceptible d'évoluer selon le développement
et l'amélioration des capteurs électroniques. De
plus, le comportement du robot sera dicté essentiellement
par les analyses faites en cours de match, et la stratégie
évoluera donc au fur et à mesure des décisions
qu'il aura prise.
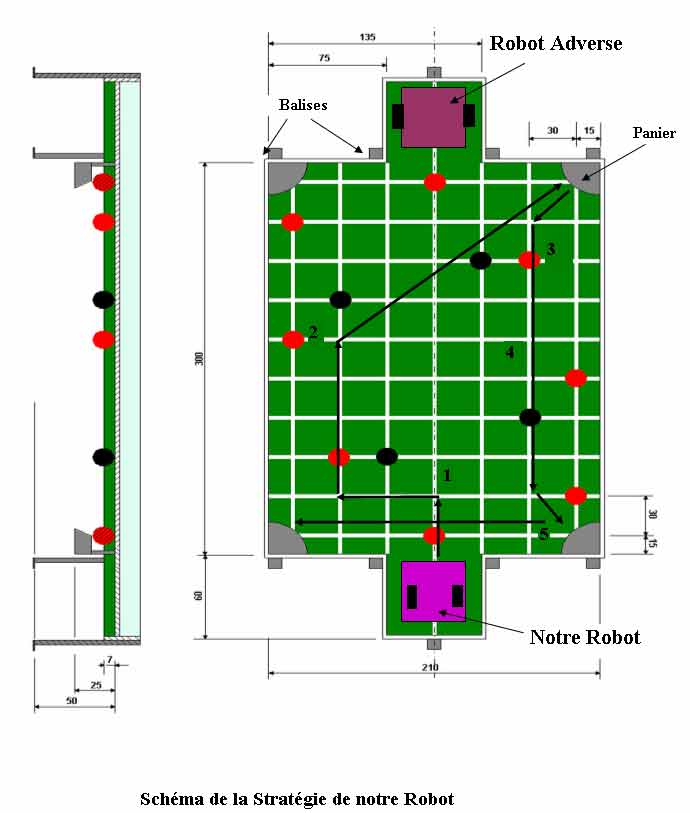
Le chemin dessiné sur le schéma ci-après
indique (ce n'est qu'un exemple) un chemin que pourrait suivre
le robot lors d'un match. Le chemin à suivre avec un adversaire
en face implique de prendre des décisions à certains
points clés que l'on a numérotés sur le chemin.
Quelle que soit la stratégie choisie (plusieurs seront
disponibles), le robot mémorise lors de ses déplacements
la position du robot adverse pour savoir de quel côté
aller ou pour savoir dans quels paniers il a déposé
ses balles, ainsi que la position des balles au sol pour tirer
profit de la symétrie du placement initial.
Exemple de match : notre robot avance pour prendre la balle rouge
placée devant lui, puis fait une première analyse
en 1. Si l'adversaire part vers la gauche du terrain, on part
du même côté (flèche) pour rechercher
les balles (et mémoriser leur emplacement) dans ce premier
quart de terrain. Arrivé à mi-chemin (2), et donc
près de l'adversaire, on refait une analyse, et on décide
de profiter de la symétrie du placement des balles pour
aller chercher celles du quart opposé, tout en allant déposer
les balles rouges dans le panier (3). On se dirige ensuite vers
le bord opposé pour aller poser nos balles noires (4).
Là, d'après les analyses de la position de l'adversaire,
on décide d'aller du côté opposé et
de marquer nos balles dans un panier vide (5). Ensuite on se dirige
vers le panier opposé, et grâce à notre ventouse
on peu sortir les balles de l'adversaire du panier, lui faisant
perdre ainsi des points.
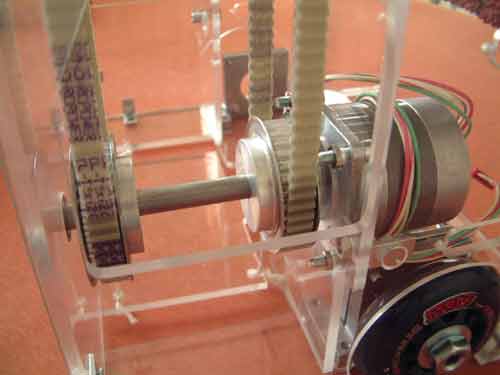
IV. Le robot en action
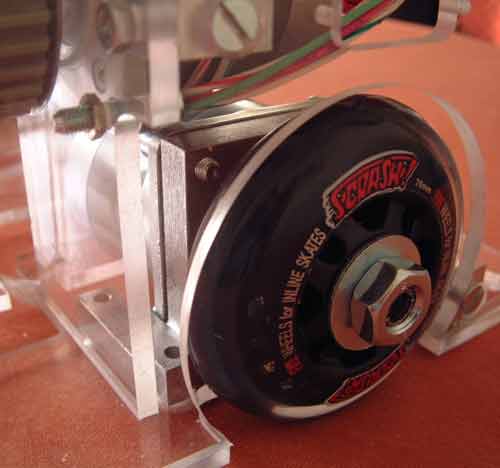
V. Les photos du robot
Voici les premières photos du robot, d'autres devront
suivrent d'ici peu...
|